设计哲学与架构概览¶
本文档阐述了 CANNs 库的核心设计原则和模块组织结构。
核心设计原则¶
CANNs 库基于两个基本原则构建,这些原则指导着其架构和实现。
关注点分离¶
该库严格将不同的功能职责分离到独立的模块中:
- :🏗️ 模型 (
canns.models): 定义神经网络动力学和状态演化
- :📊 任务 (
canns.task): 生成实验范式和输入数据
- :📈 分析器 (
canns.analyzer): 可视化和分析仿真结果
- :🧠 训练器 (
canns.trainer): 为脑启发模型实现学习规则
- :🔗 流水线 (
canns.pipeline): 编排完整的实验工作流
每个模块专注于单一职责。模型不生成自己的输入数据。任务不分析结果。分析器不修改模型参数。这种分离使代码库易于维护、测试和扩展。
通过基类实现可扩展性¶
每个主要组件都继承自抽象基类,这些基类定义了标准接口:
canns.models.basic.BasicModel用于基本 CANN 模型canns.models.brain_inspired.BrainInspiredModel用于脑启发模型canns.trainer.Trainer用于训练算法
这些基类建立了契约,确保所有实现都能与库的其余部分无缝协作。用户可以通过继承这些基类并实现所需方法来创建自定义模型、任务或训练器。
模块架构¶
四个核心应用场景¶
CANNs 库支持四种不同的工作流,每种工作流针对不同的研究需求。这些场景展示了架构的模块化设计和灵活性。
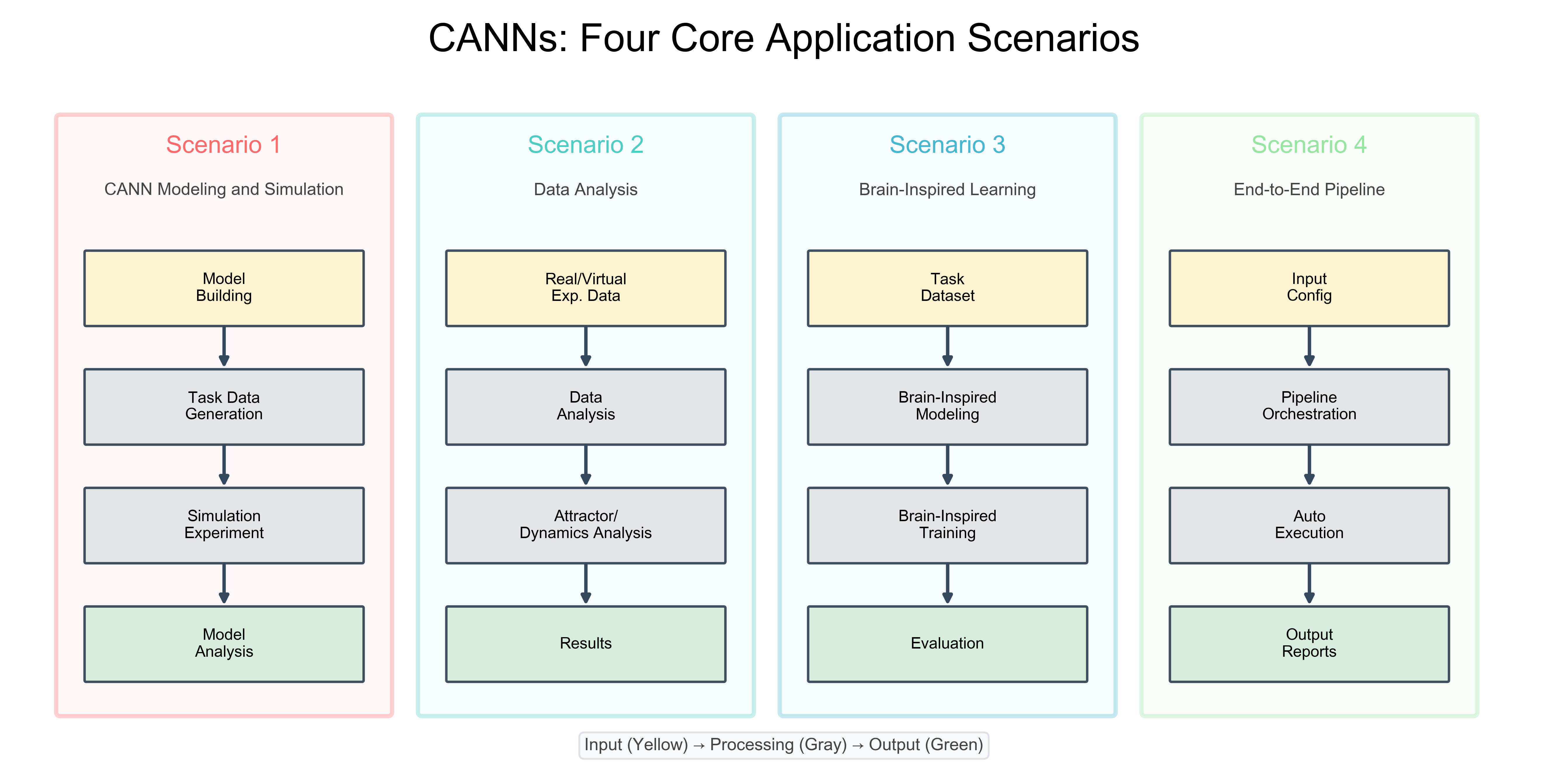
CANNs 四个核心应用场景¶
研究连续吸引子动力学的最常见工作流
模型构建 → 任务数据生成 → 仿真实验 → 模型分析
分析实验或虚拟神经记录
真实/虚拟实验数据 → 数据分析 → 吸引子/动力学分析 → 结果
使用生物学上合理的学习规则训练网络
任务数据集 → 脑启发建模 → 脑启发训练 → 评估
从配置到结果的自动化实验工作流
输入配置 → 流水线编排 → 自动执行 → 输出报告
模块交互模式¶
数据流模式
在所有场景中,模块遵循关注点分离原则进行交互:
🟡 输入阶段:数据进入系统(模型、数据集、配置)
⚫ 处理阶段:核心计算(仿真、训练、分析)
🟢 输出阶段:结果可视化和解释
这种一致的结构使库直观易用,同时支持多样化的研究工作流。
BrainPy 集成¶
CANNs 库基于 BrainPy [])构建,这是一个强大的脑动力学编程框架。BrainPy 提供:
- :⚙️ 动力学抽象:
bp.DynamicalSystem神经系统基类- :💾 状态管理:
bm.Variable容器用于所有状态变量(替代独立的 State、HiddenState、ParamState)- :⏱️ 时间步控制:
bm.set_dt(...)和bm.get_dt()用于统一的时间管理- :⚡ JIT 编译:
bm.for_loop用于高性能仿真- :🎲 随机数管理:
bm.random用于可重复的随机性
借助 BrainPy [18],CANN 模型只需定义变量和更新方程。时间步进、并行化和编译都自动处理——显著降低了实现复杂度。
模块关系¶
模块如何交互¶
模型 ↔ 任务耦合¶
某些任务需要模型实例来访问刺激生成方法。例如,SmoothTracking1D 需要访问 model.get_stimulus_by_pos() 来将位置坐标转换为神经输入模式。这种耦合是为了用户便利而有意设计的,但仅限于跟踪任务。
模型 ↔ 分析器独立性¶
分析器处理模型输出(放电率、膜电位)但不修改模型状态。它们接受 NumPy 数组形式的仿真结果并生成可视化。这种独立性使得同一个分析器可以处理任何产生兼容输出的模型。
模型 ↔ 训练器协作¶
训练器根据学习规则修改模型参数——特别是连接权重。它们通过约定的属性与模型交互,如 model.W 用于权重,model.s 用于状态向量。训练器框架专为使用局部、活动依赖可塑性的脑启发模型而设计。
流水线编排¶
canns.pipeline 模块将所有其他模块协调成完整的实验工作流。它管理从模型设置到任务执行再到结果分析的完整周期,为常见用例提供高级接口。
设计权衡¶
灵活性 vs. 便利性¶
高级用户可以覆盖任何组件或创建自定义实现
标准工作流应该只需要最少的样板代码
该库通过合理的默认值和丰富的自定义选项来实现这种平衡。例如,CANN1D() 使用适用于大多数情况的默认参数,但每个参数都可以显式指定。
性能 vs. 简洁性¶
该库通过多层策略实现高性能:
Python 层(BrainPy/JAX [17])¶
基于 JAX [17] 的编译提供 GPU/TPU 加速,但需要函数式编程模式。该库通过以下方式抽象了这种复杂性:
在 BrainPy 的
bm.for_loop中封装 JIT 编译通过
bm.Variable容器管理状态提供处理常见模式的实用函数
用户无需直接编写 JAX 特定代码即可受益于 GPU/TPU 加速。
原生层(canns-lib)¶
扩展库¶
创建自定义模型¶
要添加新模型,请继承适当的基类并实现所需方法。
必需方法:
make_conn():生成连接矩阵get_stimulus_by_pos():将位置转换为输入模式init_state():注册状态变量update():定义单步动力学
必需方法:
init_state():注册状态和权重参数update():定义状态演化energy:返回网络能量的属性
创建自定义任务¶
Tip
任务应该生成与模型期望兼容的输入序列。关键考虑因素:
使用
bm.get_dt()保持时间步一致性以模型期望的格式返回数据
提供用于分析的轨迹信息
创建自定义训练器¶
Note
训练器继承自 canns.trainer.Trainer 并实现:
train():参数更新策略predict():单样本推理标准进度和编译配置
总结¶
CANNs 库通过精心的架构选择实现其目标:
1️⃣
关注点分离 保持模块专注且独立
2️⃣
基类继承 确保一致的接口
3️⃣
BrainPy 集成 提供性能而不增加复杂性
4️⃣
灵活耦合 在便利性和模块化之间取得平衡
这些原则使快速原型开发和严谨研究成为可能,同时保持代码质量和可扩展性。