How to Train Brain-Inspired Models?¶
Goal: By the end of this guide, you’ll be able to train a Hopfield network to store and recall patterns using Hebbian learning.
Estimated Reading Time: 12 minutes
Introduction¶
Unlike deep learning models trained with backpropagation, brain-inspired models use biologically plausible learning rules like Hebbian learning [22].
This guide introduces:
The Hebbian learning principle
Training a Hopfield network for pattern memory
Using the Trainer framework
Key differences from deep learning
We’ll train a model to memorize and recall images—demonstrating associative memory in action.
What is Hebbian Learning?¶
Hebbian learning [22] is an unsupervised learning rule where synaptic weights strengthen when pre- and post-synaptic neurons are co-active:
Δw_ij = η × x_i × x_j
Where:
w_ij: Connection weight from neuronito neuronjx_i, x_j: Activities of neuronsiandjη: Learning rate (often set to 1 for simple rules)
Key properties:
Local: Weight updates depend only on activities of connected neurons (no global error signal)
Unsupervised: No labels or target outputs required
Biologically plausible: Matches synaptic plasticity observed in real neurons
Contrast with backpropagation:
Backprop: Global error signal, supervised, requires differentiable loss
Hebbian: Local activity, unsupervised, no gradient computation
Amari-Hopfield Network¶
An Amari-Hopfield Network [21, 23] is a recurrent network that stores patterns as stable attractor states. When presented with a partial or noisy pattern, the network converges to the nearest stored memory.
Use case: Associative memory, pattern completion, error correction
[1]:
from canns.models.brain_inspired import AmariHopfieldNetwork # :cite:p:`amari1977neural,hopfield1982neural`
# Create a Hopfield network with 16,384 neurons (128x128 flattened image)
model = AmariHopfieldNetwork(
num_neurons=128 * 128, # Image size when flattened
asyn=False, # Synchronous updates (all neurons update together)
activation="sign" # Binary activation: +1 or -1
)
Parameters:
num_neurons: Network size (must match input dimensionality)asyn: Asynchronous (one neuron at a time) vs synchronous updatesactivation: “sign” for binary Hopfield, “tanh” for continuous variant
The Trainer Framework¶
The library provides a unified Trainer API that abstracts training logic:
Model + Trainer + Data → Trained Model
Philosophy (from the Design Philosophy docs):
Separation of concerns: Model defines dynamics, Trainer defines learning
Reusability: Same trainer works for different models with compatible learning rules
Composability: Stack trainers for multi-stage training
For Hebbian learning, we use HebbianTrainer:
[2]:
from canns.trainer import HebbianTrainer
trainer = HebbianTrainer(model)
Key methods:
trainer.train(data): Train on a list of patternstrainer.predict(pattern): Recall a single patterntrainer.predict_batch(patterns): Batch recall (compiled for speed)
Complete Example: Image Memory¶
Let’s train a Hopfield network [21] to memorize 4 images and recall them from corrupted versions.
Step 1: Prepare Training Data¶
[4]:
import numpy as np
import skimage.data
from skimage.color import rgb2gray
from skimage.transform import resize
from skimage.filters import threshold_mean
def preprocess_image(img, size=128):
"""Convert image to binary {-1, +1} pattern."""
# Convert to grayscale if needed
if img.ndim == 3:
img = rgb2gray(img)
# Resize to fixed size
img = resize(img, (size, size), anti_aliasing=True)
# Threshold to binary
thresh = threshold_mean(img)
binary = img > thresh
# Map to {-1, +1}
pattern = np.where(binary, 1.0, -1.0).astype(np.float32)
# Flatten to 1D
return pattern.reshape(size * size)
# Load example images from scikit-image
camera = preprocess_image(skimage.data.camera())
astronaut = preprocess_image(skimage.data.astronaut())
horse = preprocess_image(skimage.data.horse().astype(np.float32))
coffee = preprocess_image(skimage.data.coffee())
training_data = [camera, astronaut, horse, coffee]
print(f"Number of patterns: {len(training_data)}")
print(f"Pattern shape: {training_data[0].shape}") # (16384,) = 128*128
Number of patterns: 4
Pattern shape: (16384,)
Why binary {-1, +1}?
Classic Hopfield networks [21] use binary neurons
Simplifies the energy function and update rules
Real-valued extensions exist (use
activation="tanh")
Step 2: Create Model and Trainer¶
[5]:
from canns.models.brain_inspired import AmariHopfieldNetwork # :cite:p:`amari1977neural,hopfield1982neural`
from canns.trainer import HebbianTrainer
# Create Hopfield network (auto-initializes)
model = AmariHopfieldNetwork(
num_neurons=training_data[0].shape[0],
asyn=False,
activation="sign"
)
# Create Hebbian trainer
trainer = HebbianTrainer(model)
print("Model and trainer initialized!")
Model and trainer initialized!
Step 3: Train the Model¶
[6]:
# Train on all patterns (this computes Hebbian weight matrix)
trainer.train(training_data)
print("Training complete! Patterns stored in weights.")
Training complete! Patterns stored in weights.
What happened internally:
[ ]:
# Simplified version of Hebbian weight update
for pattern in training_data:
W += np.outer(pattern, pattern) # Hebbian: w_ij += x_i * x_j
W /= len(training_data) # Normalize
np.fill_diagonal(W, 0) # No self-connections
The weight matrix W now encodes all training patterns as attractor states.
Step 4: Test Pattern Recall¶
Create corrupted versions of the training images:
[8]:
def corrupt_pattern(pattern, noise_level=0.3):
"""Randomly flip 30% of pixels."""
corrupted = np.copy(pattern)
num_flips = int(len(pattern) * noise_level)
flip_indices = np.random.choice(len(pattern), num_flips, replace=False)
corrupted[flip_indices] *= -1 # Flip sign
return corrupted
# Create test patterns (30% corrupted)
test_patterns = [corrupt_pattern(p, 0.3) for p in training_data]
print(f"Created {len(test_patterns)} corrupted test patterns")
Created 4 corrupted test patterns
Step 5: Recall Patterns¶
[9]:
# Batch prediction (compiled for efficiency)
recalled = trainer.predict_batch(test_patterns, show_sample_progress=True)
print("Pattern recall complete!")
print(f"Recalled patterns shape: {np.array(recalled).shape}")
Processing samples: 100%|█████████████| 4/4 [00:04<00:00, 1.15s/it, sample=4/4]
Pattern recall complete!
Recalled patterns shape: (4, 16384)
What’s happening:
For each corrupted pattern, the network iterates its dynamics
The activity converges to the nearest stored attractor (original image)
The result is the “cleaned up” pattern
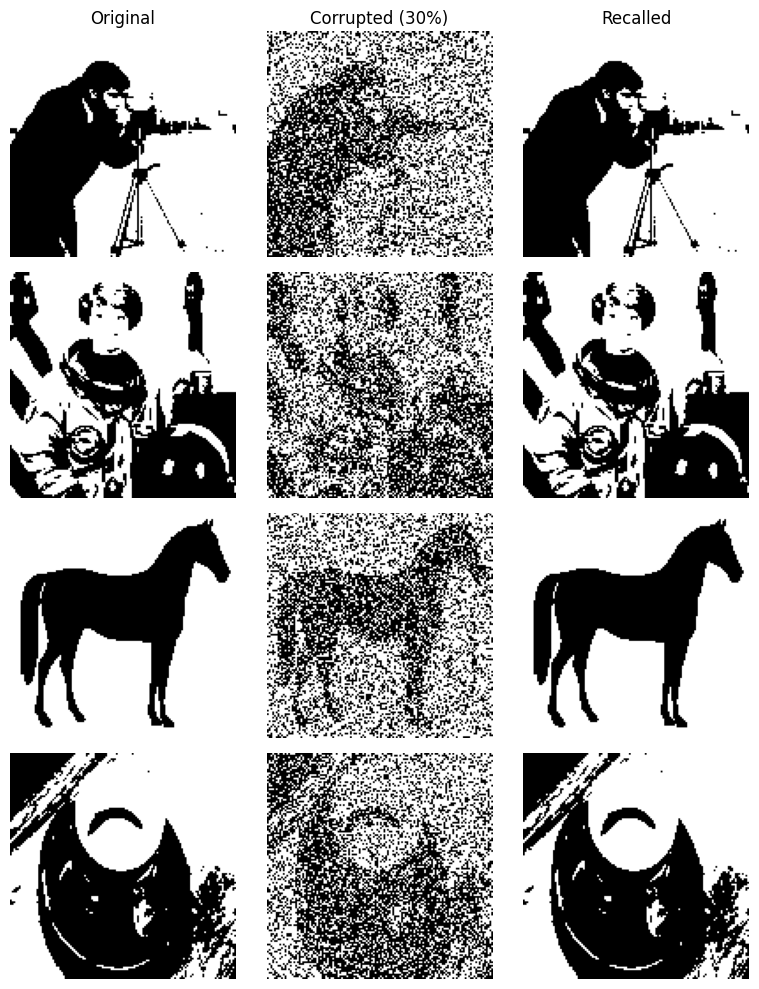
Step 6: Visualize Results¶
[10]:
import matplotlib.pyplot as plt
def reshape_for_display(pattern, size=128):
"""Reshape 1D pattern back to 2D image."""
return pattern.reshape(size, size)
# Plot original, corrupted, and recalled patterns
fig, axes = plt.subplots(len(training_data), 3, figsize=(8, 10))
for i in range(len(training_data)):
# Column 1: Original training image
axes[i, 0].imshow(reshape_for_display(training_data[i]), cmap='gray')
axes[i, 0].axis('off')
if i == 0:
axes[i, 0].set_title('Original')
# Column 2: Corrupted test input
axes[i, 1].imshow(reshape_for_display(test_patterns[i]), cmap='gray')
axes[i, 1].axis('off')
if i == 0:
axes[i, 1].set_title('Corrupted (30%)')
# Column 3: Recalled output
axes[i, 2].imshow(reshape_for_display(recalled[i]), cmap='gray')
axes[i, 2].axis('off')
if i == 0:
axes[i, 2].set_title('Recalled')
plt.tight_layout()
plt.savefig('hopfield_memory_recall.png', dpi=150)
plt.show()
print("Visualization saved!")
Visualization saved!
Expected result:
Original images are clean
Corrupted inputs have ~30% noise
Recalled outputs match originals (noise corrected!)
Complete Runnable Code¶
Here’s the full example in one block:
[ ]:
import numpy as np
import skimage.data
from skimage.color import rgb2gray
from skimage.transform import resize
from skimage.filters import threshold_mean
from matplotlib import pyplot as plt
from canns.models.brain_inspired import AmariHopfieldNetwork # :cite:p:`amari1977neural,hopfield1982neural`
from canns.trainer import HebbianTrainer
np.random.seed(42)
# 1. Preprocess images
def preprocess_image(img, size=128):
if img.ndim == 3:
img = rgb2gray(img)
img = resize(img, (size, size), anti_aliasing=True)
thresh = threshold_mean(img)
binary = img > thresh
pattern = np.where(binary, 1.0, -1.0).astype(np.float32)
return pattern.reshape(size * size)
camera = preprocess_image(skimage.data.camera())
astronaut = preprocess_image(skimage.data.astronaut())
horse = preprocess_image(skimage.data.horse().astype(np.float32))
coffee = preprocess_image(skimage.data.coffee())
training_data = [camera, astronaut, horse, coffee]
# 2. Create model and trainer (auto-initializes)
model = AmariHopfieldNetwork(num_neurons=training_data[0].shape[0], asyn=False, activation="sign")
trainer = HebbianTrainer(model)
# 3. Train
trainer.train(training_data)
# 4. Create corrupted test patterns
def corrupt_pattern(pattern, noise_level=0.3):
corrupted = np.copy(pattern)
num_flips = int(len(pattern) * noise_level)
flip_indices = np.random.choice(len(pattern), num_flips, replace=False)
corrupted[flip_indices] *= -1
return corrupted
test_patterns = [corrupt_pattern(p, 0.3) for p in training_data]
# 5. Recall patterns
recalled = trainer.predict_batch(test_patterns, show_sample_progress=True)
# 6. Visualize
def reshape(pattern, size=128):
return pattern.reshape(size, size)
fig, axes = plt.subplots(len(training_data), 3, figsize=(8, 10))
for i in range(len(training_data)):
axes[i, 0].imshow(reshape(training_data[i]), cmap='gray')
axes[i, 0].axis('off')
axes[i, 1].imshow(reshape(test_patterns[i]), cmap='gray')
axes[i, 1].axis('off')
axes[i, 2].imshow(reshape(recalled[i]), cmap='gray')
axes[i, 2].axis('off')
axes[0, 0].set_title('Original')
axes[0, 1].set_title('Corrupted')
axes[0, 2].set_title('Recalled')
plt.tight_layout()
plt.savefig('hopfield_memory.png')
plt.show()
CANN vs. Deep Learning Training¶
Aspect |
Hebbian Learning |
Deep Learning (ANNs) |
|---|---|---|
Learning rule |
Local (Hebbian, STDP [24]) |
Global (Backpropagation) |
Supervision |
Unsupervised |
Supervised (usually) |
Gradient |
No gradient computation |
Requires autodiff |
Training data |
Patterns to memorize |
Labeled input-output pairs |
Objective |
Form attractors |
Minimize loss function |
Biological plausibility |
High |
Low |
Speed |
Fast (one-shot learning possible) |
Slow (many epochs) |
Capacity |
Limited (~0.15N patterns for N neurons) |
Very large (overparameterization) |
When to use each:
Hebbian/CANNs: Associative memory, pattern completion, neuroscience modeling
Backprop/ANNs: Classification, regression, large-scale pattern recognition
The Trainer Abstraction¶
The Trainer framework provides a consistent interface across different learning paradigms:
[ ]:
# All trainers follow this pattern
trainer = SomeTrainer(model)
trainer.train(data)
output = trainer.predict(input)