How to Generate Task Data?¶
Goal: By the end of this guide, you’ll be able to generate task inputs for CANN simulations.
Estimated Reading Time: 10 minutes
Introduction¶
CANN models need input stimuli to simulate realistic behaviors—tracking moving targets, encoding spatial positions, or responding to population-coded signals. Instead of manually creating these inputs, the Task API provides ready-to-use generators for common experimental paradigms.
This guide shows you how to:
Create a smooth tracking task
Generate task data
Understand the task data structure
Use task data in your simulations
What are Tasks?¶
Tasks are objects that generate time-varying input stimuli for CANN models. They handle the complexity of:
Creating biologically realistic input patterns
Managing timing and duration
Formatting data for efficient simulation loops
Tracking metadata (e.g., target positions, velocities)
Key principle: Tasks generate inputs → Models consume inputs in simulation loops.
Creating a Smooth Tracking Task¶
The most common task is smooth tracking, where a stimulus moves smoothly across the neural population:
[1]:
import brainpy.math as bm
from canns.models.basic import CANN1D
from canns.task.tracking import SmoothTracking1D
import jax
# Set up environment and model (from previous guide)
bm.set_dt(0.1)
cann = CANN1D(num=512)
# Create a smooth tracking task
task = SmoothTracking1D(
cann_instance=cann, # Link to the CANN model
Iext=(1.0, 0.75, 2.0, 1.75, 3.0), # External input positions (in radians)
duration=(10.0, 10.0, 10.0, 10.0), # Duration at each position (ms)
time_step=bm.get_dt() # Simulation time step
)
What’s happening:
cann_instance: The task needs the model instance to access itsget_stimulus_by_pos()method, which generates spatially-localized input patterns for given positions. The task also uses the model’s structure (neuron positions, network size) to create appropriate stimuli.Iext: Sequence of target positions where the stimulus will appear (in radians, from -π to π)duration: How long the stimulus stays at each position (in milliseconds)time_step: Should match the model’sdtfor synchronization
Important: CANN models must provide a get_stimulus_by_pos(position) method that returns the input pattern for a given spatial position. This method is called by the task to generate data.
Generating the Data¶
Once the task is created, generate the actual input arrays:
[2]:
# Generate all task data
task.get_data()
<SmoothTracking1D> Generating Task data: 400it [00:00, 1593.79it/s]
This method pre-computes all input stimuli for the entire simulation. The data is stored in task.data.
Understanding Task Data Structure¶
Let’s inspect what the task generated:
[3]:
print(f"Data shape: {task.data.shape}")
print(f"Number of time steps: {task.run_steps.shape[0]}")
print(f"Time step size: {task.time_step} ms")
print(f"Total simulation time: {task.run_steps.shape[0] * task.time_step} ms")
Data shape: (400, 512)
Number of time steps: 400
Time step size: 0.1 ms
Total simulation time: 40.0 ms
[4]:
from canns.analyzer.visualization import PlotConfigs, energy_landscape_1d_static
# Create configuration for static plot
config = PlotConfigs.energy_landscape_1d_static(
time_steps_per_second=100,
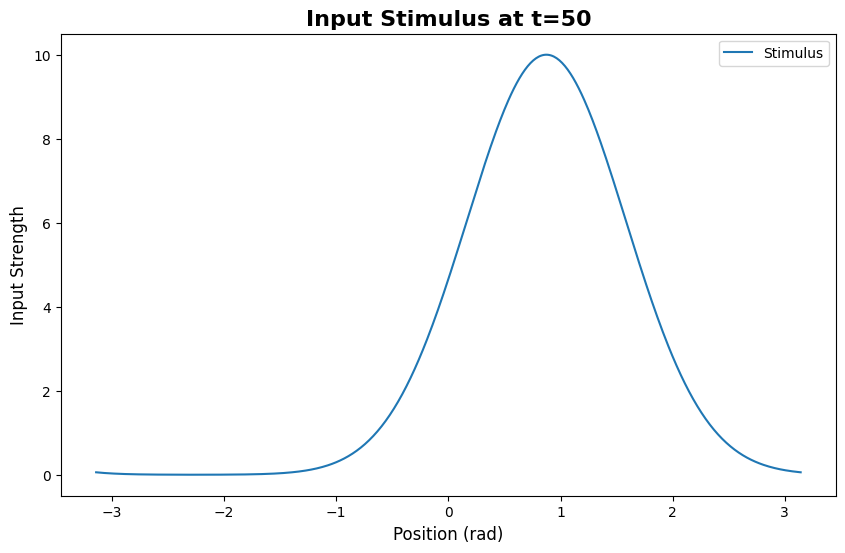
title='Input Stimulus at t=50',
xlabel='Position (rad)',
ylabel='Input Strength',
show=True
)
# Plot input at time step 50
energy_landscape_1d_static(
data_sets={'Stimulus': (cann.x, task.data[50])},
config=config
)
[4]:
(<Figure size 1000x600 with 1 Axes>,
<Axes: title={'center': 'Input Stimulus at t=50'}, xlabel='Position (rad)', ylabel='Input Strength'>)
You’ll see a Gaussian-shaped bump centered at one of the Iext positions.
Using Task Data in Simulations¶
Now connect the task data to your model simulation:
[5]:
def run_step(t, stimulus):
"""Simulation step function."""
cann(stimulus) # Feed stimulus to model
return cann.u.value, cann.r.value # Return synaptic input and activity
# Run the simulation with task data
us, rs = bm.for_loop(
run_step,
operands=(task.run_steps, task.data),
progress_bar=10
)
print(f"Synaptic input shape: {us.shape}") # (400, 512)
print(f"Neural activity shape: {rs.shape}") # (400, 512)
Synaptic input shape: (400, 512)
Neural activity shape: (400, 512)
The workflow:
task.dataprovides stimuli for each time stepfor_loopiterates through time stepsAt each step, the stimulus is passed to
run_stepThe model updates its state and returns results
All results are collected into arrays (
us,rs)
Complete Working Example¶
Here’s the full pipeline from model creation to task-driven simulation:
[6]:
import brainpy.math as bm # :cite:p:`wang2023brainpy`
from canns.models.basic import CANN1D
from canns.task.tracking import SmoothTracking1D
# 1. Setup
bm.set_dt(0.1)
# 2. Create model (auto-initializes)
cann = CANN1D(num=512)
# 3. Create task
task = SmoothTracking1D(
cann_instance=cann,
Iext=(1.0, 0.75, 2.0, 1.75, 3.0),
duration=(10.0, 10.0, 10.0, 10.0),
time_step=bm.get_dt(),
)
task.get_data()
# 4. Run simulation
def run_step(t, stimulus):
cann(stimulus)
return cann.u.value, cann.r.value
us, rs = bm.for_loop(
run_step,
operands=(task.run_steps, task.data),
progress_bar=10
)
print("Simulation complete!")
print(f"Captured {us.shape[0]} time steps of activity")
<SmoothTracking1D> Generating Task data: 400it [00:00, 3246.41it/s]
Simulation complete!
Captured 400 time steps of activity
Exploring Task Parameters¶
SmoothTracking1D is flexible. Try different configurations:
Example 1: Fast Tracking¶
[7]:
task_fast = SmoothTracking1D(
cann_instance=cann,
Iext=(0.0, 1.0, 2.0),
duration=(5.0, 5.0), # Shorter durations = faster transitions
time_step=0.1
)
Example 2: Many Positions¶
[9]:
import jax.numpy as jnp
# Track across 10 evenly spaced positions
positions = jnp.linspace(-3.0, 3.0, 10)
durations = [8.0] * 9
task_dense = SmoothTracking1D(
cann_instance=cann,
Iext=tuple(positions),
duration=tuple(durations),
time_step=0.1
)
Example 3: Variable Durations¶
[10]:
# Different durations for each position
task_variable = SmoothTracking1D(
cann_instance=cann,
Iext=(0.0, 1.5, -1.0, 2.0),
duration=(15.0, 5.0, 10.0), # Stay longer at first position
time_step=0.1
)
Other Task Types¶
While this guide focuses on SmoothTracking1D, the library includes other task generators:
SmoothTracking2D: 2D spatial trackingPopulationCoding: Population-coded inputsClosedLoopNavigation: Interactive navigation with feedbackOpenLoopNavigation: Pre-defined trajectories
All follow the same pattern:
Create task with parameters
Call
task.get_data()Use
task.datain simulation loops
We’ll explore these in the Full Details section.
Common Questions¶
Q: Can I modify task data after generation?
Yes! task.data is a JAX array you can manipulate:
[11]:
task.get_data()
# Add noise to all inputs
task.data = task.data + 0.1 * jax.random.normal(jax.random.PRNGKey(0), task.data.shape)
<SmoothTracking1D> Generating Task data: 400it [00:00, 9170.08it/s]
Q: What if I want custom input patterns?
You can create tasks as templates and modify them, or generate inputs manually:
[12]:
import jax.numpy as jnp
# Create custom input sequence
custom_data = jnp.zeros((100, 512))
for t in range(100):
position = jnp.sin(t * 0.1) # Sinusoidal movement
custom_data = custom_data.at[t].set(
jnp.exp(-0.5 * (cann.x - position)**2 / 0.3**2)
)
Q: Do I need to call ``get_data()`` every time?
Only once per task instance. The data is cached:
[ ]:
task.get_data() # Generates data
# ... use task.data in simulations
# If you change parameters, recreate the task
task_new = SmoothTracking1D(...)
task_new.get_data()
Next Steps¶
Now that you can generate task data, you’re ready to:
Analyze CANN model dynamics - Visualize energy landscapes, bump tracking, and more
Explore Task Generators - Learn about all available task types and their use cases
Full Task API Reference - Complete documentation of all task parameters and methods
Questions? Check the Core Concepts: Task Generators or GitHub Discussions.