设计哲学¶
连续吸引子神经网络(CANNs)Python 库设计理念手册,通过了解各个模块的功能来快速上手本项目。
本库围绕CANNs提供统一的高级 API,使用户可以轻松加载、分析和训练最先进的 CANN 架构,从而帮助研究人员和开发者快速开展实验并部署类脑解决方案。
模块总览¶
model本库的内置模型模块。basic基础CANNs模型及其各个变体。brain_inspired各种类脑模型。hybridCANN与ANN或其他的混合模型。
task针对CANN的任务模块,包含任务的生成、保存、读取、导入、可视化等功能。analyzer分析模块,主要为可视化作图。model analyzer专注于对CANN模型进行分析,包括能量景观、发放率、调谐曲线等。data analyzer专注于实验数据的CANN分析或虚拟RNN模型的动力学分析
trainer训练模块,提供统一的学习与预测流程。pipeline通过将上述模块组合,形成一套端到端的流程,使得对于某些需求可以最简化调用,用户友好。
各模块详解¶
models¶
总览¶
模型模块实现不同维度的CANN基础模型及其变体,脑启发模型以及CANN混合模型。该模块是本库的基础,可以与其他的模块来进行交互来实现各种场景的应用。
这里根据不同的模型类型进行分类:
Basic Models (canns.models.basic) 基础的CANNs模型及其各个变体。
Brain-Inspired Models (canns.models.brain_inspired) 类脑模型。
Hybrid Models (canns.models.hybrid) CANN与ANN或其他的混合模型。
在这里主要依赖Brain simulation ecosystem中的brainstate来实现各个模型。brainstate 是 Brain Simulation Ecosystem 中面向动力系统的核心框架,底层基于 JAX/BrainUnit。它提供 brainstate.nn.Dynamics 抽象、State/HiddenState/ParamState 状态容器以及 brainstate.environ 统一的时间步长管理,与 brainstate.compile.for_loop、brainstate.random 等工具一起,让我们可以写出既可
JIT 编译又支持自动微分的神经网络动力学。借助这些接口,CANN 模型只需描述变量与更新方程,时间推进、并行化和随机数管理都由 brainstate 负责,从而显著降低实现成本。
用法示例¶
以下示例概括了在库中使用模型的完整流程,可分别参考 examples/cann/cann1d_oscillatory_tracking.py、examples/cann/cann2d_tracking.py 与 examples/brain_inspired/hopfield_train.py:
[1]:
import brainstate as bst
from canns.models.basic import CANN1D, CANN2D
from canns.task.tracking import SmoothTracking1D, SmoothTracking2D
from canns.analyzer.plotting import (
PlotConfigs,
energy_landscape_1d_animation,
energy_landscape_2d_animation,
)
bst.environ.set(dt=0.1)
# 创建1D CANN实例并初始化状态
cann = CANN1D(num=512) # 512个神经元
cann.init_state() # 初始化神经网络状态
# 这里使用SmoothTracking1D的task,在之后的章节会具体介绍
task_1d = SmoothTracking1D(
cann_instance=cann,
Iext=(1.0, 0.75, 2.0, 1.75, 3.0),
duration=(10.0,) * 4,
time_step=bst.environ.get_dt(),
)
task_1d.get_data() # 生成任务数据
# 写一个step函数,传入stimulus,运行CANN1D实例
def step_1d(_, stimulus):
cann(stimulus) # 使用传入的stimulus更新CANN状态
return cann.u.value, cann.inp.value # 返回神经元膜电位和输入
us, inputs = bst.compile.for_loop(step_1d, task_1d.run_steps, task_1d.data) # 使用brainstate的for_loop编译step函数
<SmoothTracking1D> Generating Task data: 400it [00:00, 2409.20it/s]
对于脑启发模型,可参考下述 Hopfield 示例(见 examples/brain_inspired/hopfield_train.py),在噪声图像上完成模式恢复:
[ ]:
from canns.models.brain_inspired import AmariHopfieldNetwork
from canns.trainer import HebbianTrainer
# 创建 Amari Hopfield 网络实例并初始化状态
model = AmariHopfieldNetwork(num_neurons=128 * 128, asyn=False, activation='sign')
model.init_state() # 初始化神经网络状态
trainer = HebbianTrainer(model) # 创建 HebbianTrainer 实例, 在之后的章节会具体介绍
trainer.train(train_patterns) # train_patterns: List[np.ndarray] 形状为 (N,), 进行训练
denoised = trainer.predict_batch(noisy_patterns, show_sample_progress=True)
拓展开发指南¶
因为基础实现完全依赖 brainstate,开发者在拓展模型时建议同步查阅官方文档:https://brainstate.readthedocs.io ,重点掌握 nn.Dynamics 的状态注册方式、environ.set/get_dt 的时间管理、compile.for_loop 的批量执行范式,以及 ParamState/HiddenState 的使用习惯。这些概念有助于写出与现有模型兼容的数值结构和 API。
对于基础模型¶
每个模型都继承自canns.models.basic.BasicModel或canns.models.basic.BasicModelGroup类,并实现了以下主要方法:
在基础模型中需要完成的主要工作:
继承
canns.models.basic.BasicModel或BasicModelGroup,在__init__中调用父类构造(例如super().__init__(math.prod(shape), **kwargs))并保存好shape、varshape等维度信息;实现
make_conn()生成连接矩阵,并在构造函数里赋值给self.conn_mat(可参考src/canns/models/basic/cann.py中的高斯核实现);实现
get_stimulus_by_pos(pos),根据特征空间的位置返回外部刺激,供任务模块调用;在
init_state()注册brainstate.HiddenState/State(常见的有self.u、self.r、self.inp),确保更新函数能够直接读写;在
update(inputs)中写出单步动力学,记得乘以brainstate.environ.get_dt()维持数值稳定;需要暴露诊断量或轴信息时,通过属性/方法返回(如
self.x、self.rho),供任务、分析器和流水线重用。
对于脑启发模型¶
每个模型都继承自canns.models.brain_inspired.BrainInspiredModel或canns.models.brain_inspired.BrainInspiredModelGroup类,并实现了
若要扩展脑启发模型(继承 BrainInspiredModel 或 BrainInspiredModelGroup),请确保:
在
init_state()中至少注册状态向量(默认self.s)和连接权重self.W,其中self.W建议使用brainstate.ParamState以便 Hebbian 学习直接写入;如果权重属性名称不是
W,重写weight_attr以便HebbianTrainer能找到;实现
update(...)与energy属性,确保训练器可以运行通用预测循环并判定收敛;需要定制 Hebbian 规则时实现
apply_hebbian_learning(patterns),否则可以完全依赖训练器的通用实现;若模型支持动态尺寸调整,可重写
resize(num_neurons, preserve_submatrix=True),参考src/canns/models/brain_inspired/hopfield.py中的做法。
对于混合模型¶
在未来实现,待定。
task¶
总览¶
任务模块主要用于生成、保存、读取、导入和可视化各种CANN任务。该模块提供了多种预定义的任务类型,并允许用户自定义任务以满足特定需求。
用法示例¶
以一维跟踪任务为例(见 examples/cann/cann1d_oscillatory_tracking.py):
[20]:
from canns.task.tracking import SmoothTracking1D
from canns.models.basic import CANN1D
from canns.analyzer.plotting import energy_landscape_1d_animation, PlotConfigs
# 创建 SmoothTracking1D 任务
task_st = SmoothTracking1D(
cann_instance=cann,
Iext=(1., 0.75, 2., 1.75, 3.), # 外部输入强度,对于SmoothTracking1D任务,这里表示不同阶段的起始与结束输入强度,对应着下面的duration
duration=(10., 10., 10., 10.), # 每个阶段的持续时间,这里表示任务总共分为4个阶段,每个阶段持续10.0时间单位
time_step=bst.environ.get_dt(),
)
task_st.get_data() # 生成任务数据
task_st.data # 任务数据,包括时间序列和对应的外部输入
<SmoothTracking1D> Generating Task data: 400it [00:00, 9206.62it/s]
[20]:
array([[0.10189284, 0.09665093, 0.09165075, ..., 0.11314222, 0.10738649,
0.10189275],
[0.10079604, 0.09560461, 0.09065294, ..., 0.11193825, 0.10623717,
0.10079593],
[0.09970973, 0.0945684 , 0.08966482, ..., 0.11074577, 0.10509886,
0.09970973],
...,
[9.72546482, 9.68417931, 9.64015198, ..., 9.79967213, 9.76397419,
9.72546482],
[9.76497078, 9.72653675, 9.68532467, ..., 9.83337116, 9.80059338,
9.76497078],
[9.80151176, 9.76596642, 9.72760582, ..., 9.86403942, 9.8342123 ,
9.80151081]], shape=(400, 512))
SmoothTracking1D/SmoothTracking2D 会自动根据关键点生成平滑轨迹,task.data 与 task.Iext_sequence 可直接喂给模型或分析器。
所有任务都继承了基类的 save_data/load_data 方法,便于重复实验:
[21]:
task.save_data("outputs/tracking_task.npz")
# ... 稍后或在另一台机器上
restored = SmoothTracking1D(
cann_instance=cann_model,
Iext=(1.0, 0.8, 2.2, 1.5),
duration=(8.0,) * 3,
time_step=bst.environ.get_dt(),
)
restored.load_data("outputs/tracking_task.npz")
Data successfully saved to: outputs/tracking_task.npz
Data successfully loaded from: outputs/tracking_task.npz
当 self.data 是 dataclass(如 OpenLoopNavigationData)时,基类会自动拆分字段保存,并在读取时重新构造结构化对象。
OpenLoopNavigationTask 既可以自生成轨迹,也支持导入实验数据。具体用法可以参考 examples/cann/theta_sweep_grid_cell_network.py 导入实验数据轨迹可以参考 examples/cann/import_external_trajectory.py:
[3]:
import numpy as np
import os
from canns.task.open_loop_navigation import OpenLoopNavigationTask
# 使用numpy加载外部位置数据
data = np.load(os.path.join(os.getcwd(), "..", "..", "en", "notebooks", "external_trajectory.npz"))
positions = data["positions"] # 形状为 (time_steps, 2)
times = data["times"] # 形状为 (time_steps,)
simulate_time = times[-1] - times[0]
env_size = 1.8
dt = 0.1
task = OpenLoopNavigationTask(duration=simulate_time, width=env_size, height=env_size, dt=dt)
task.import_data(position_data=positions, times=times) # 导入外部位置数据
task.calculate_theta_sweep_data() # 计算 theta sweep数据
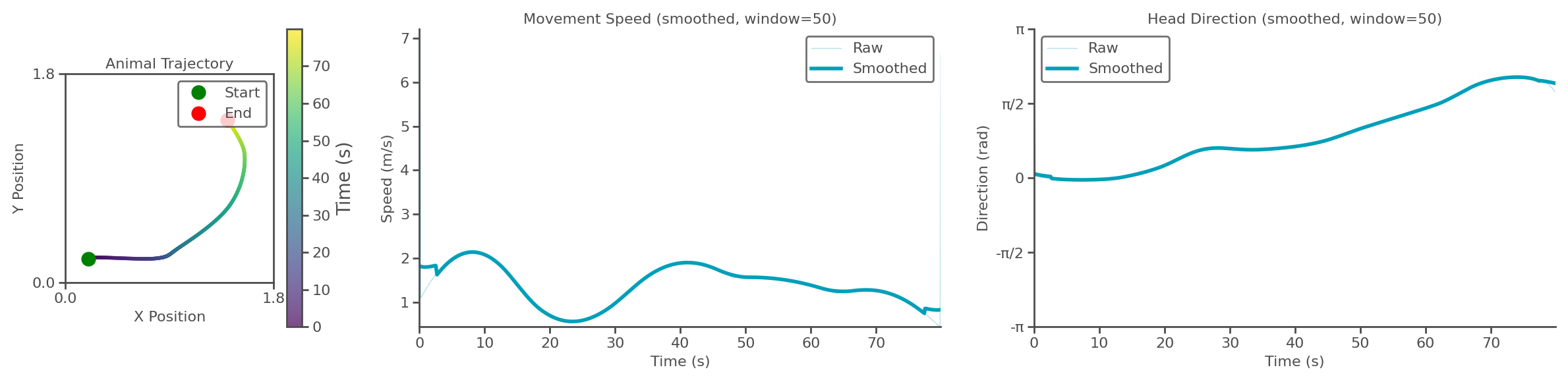
task.show_trajectory_analysis(save_path="trajectory.png", show=True, smooth_window=50) # 可视化轨迹分析
Successfully imported trajectory data with 800 time steps
Spatial dimensions: 2D
Time range: 0.000 to 1.598 s
Mean speed: 1.395 units/s
Trajectory analysis saved to: trajectory.png
拓展开发指南¶
用户可以通过继承canns.task.Task类来创建自定义任务。需要实现以下主要方法:
自定义任务时可遵循以下步骤:
继承
canns.task.Task,在构造函数中解析配置并(可选)指定data_class;实现
get_data()生成或载入数据,并把结果写入self.data(可以是numpy.ndarray或 dataclass);需要导入外部数据时提供
import_data(...)等辅助方法,保持self.data的结构与get_data()输出一致;实现
show_data(show=True, save_path=None),给出最重要的可视化;如需持久化直接复用基类
save_data/load_data,避免重复造轮子。
analyzer¶
总览¶
分析模块提供了丰富的工具,用于对CANN模型和实验数据进行深入分析和可视化。该模块分为两大类:模型分析和数据分析。
用法¶
模型分析¶
模型与任务配合后,可用 analyzer 生成可视化。例如延续 1D 跟踪流程:
[ ]:
import brainstate
from canns.task.tracking import SmoothTracking1D
from canns.models.basic import CANN1D
from canns.analyzer.plotting import energy_landscape_1d_animation, PlotConfigs
brainstate.environ.set(dt=0.1)
# 创建 SmoothTracking1D 任务
task_st = SmoothTracking1D(
cann_instance=cann,
Iext=(1., 0.75, 2., 1.75, 3.), # 外部输入强度,对于SmoothTracking1D任务,这里表示不同阶段的起始与结束输入强度,对应着下面的duration
duration=(10., 10., 10., 10.), # 每个阶段的持续时间,这里表示任务总共分为4个阶段,每个阶段持续10.0时间单位
time_step=brainstate.environ.get_dt(),
)
task_st.get_data() # 生成任务数据
# 写一个step函数,传入inputs,运行CANN1D实例
def run_step(t, inputs):
cann(inputs)
return cann.u.value, cann.inp.value
# 使用 brainstate.compile.for_loop 编译 step 函数
us, inps = brainstate.compile.for_loop(
run_step,
task_st.run_steps, # 任务总共需要运行的时间步数
task_st.data, # 任务数据,这里为 SmoothTracking1D 生成的刺激
pbar=brainstate.compile.ProgressBar(10) # 每10步更新一次进度条
)
# 配置并生成能量图动画
config = PlotConfigs.energy_landscape_1d_animation(
time_steps_per_second=100,
fps=20,
title='Smooth Tracking 1D',
xlabel='State',
ylabel='Activity',
repeat=True,
save_path='smooth_tracking_1d.gif',
show=False
)
# 生成能量图动画
energy_landscape_1d_animation(
data_sets={'u': (cann.x, us), 'Iext': (cann.x, inps)},
config=config
)
二维情形可调用 energy_landscape_2d_animation(zs_data=...) 输出二维活动热力图。
数据分析¶
实验数据分析流程可直接参考仓库中的两个脚本:
examples/experimental_cann1d_analysis.py:load_roi_data()读取示例 ROI 数据,随后利用bump_fits、create_1d_bump_animation拟合并生成 1D bump 动画;examples/experimental_cann2d_analysis.py:在embed_spike_trains生成埋入结果后,结合 UMAP 与plot_projection降维可视化,再调用tda_vis、decode_circular_coordinates和plot_3d_bump_on_torus完成拓扑分析与环面动画。
拓展开发指南¶
模型分析¶
Analyzer 虽无统一基类,但推荐遵循 src/canns/analyzer/plotting/config.py 的配置范式:通过 PlotConfig/PlotConfigs 统一标题、坐标轴、动画帧率等参数,并在绘图函数中接收 config 对象。这种写法能让可视化接口保持一致,也方便用户定制默认样式。
数据分析¶
同样,数据分析工具也没有统一的基类。用户可以根据具体需求创建自己的数据分析工具。
trainer¶
总览¶
训练模块提供了统一的接口,用于训练和评估类脑模型。暂时只提供hebbian learning的训练方式,未来会加入更多的类脑训练方法。
用法¶
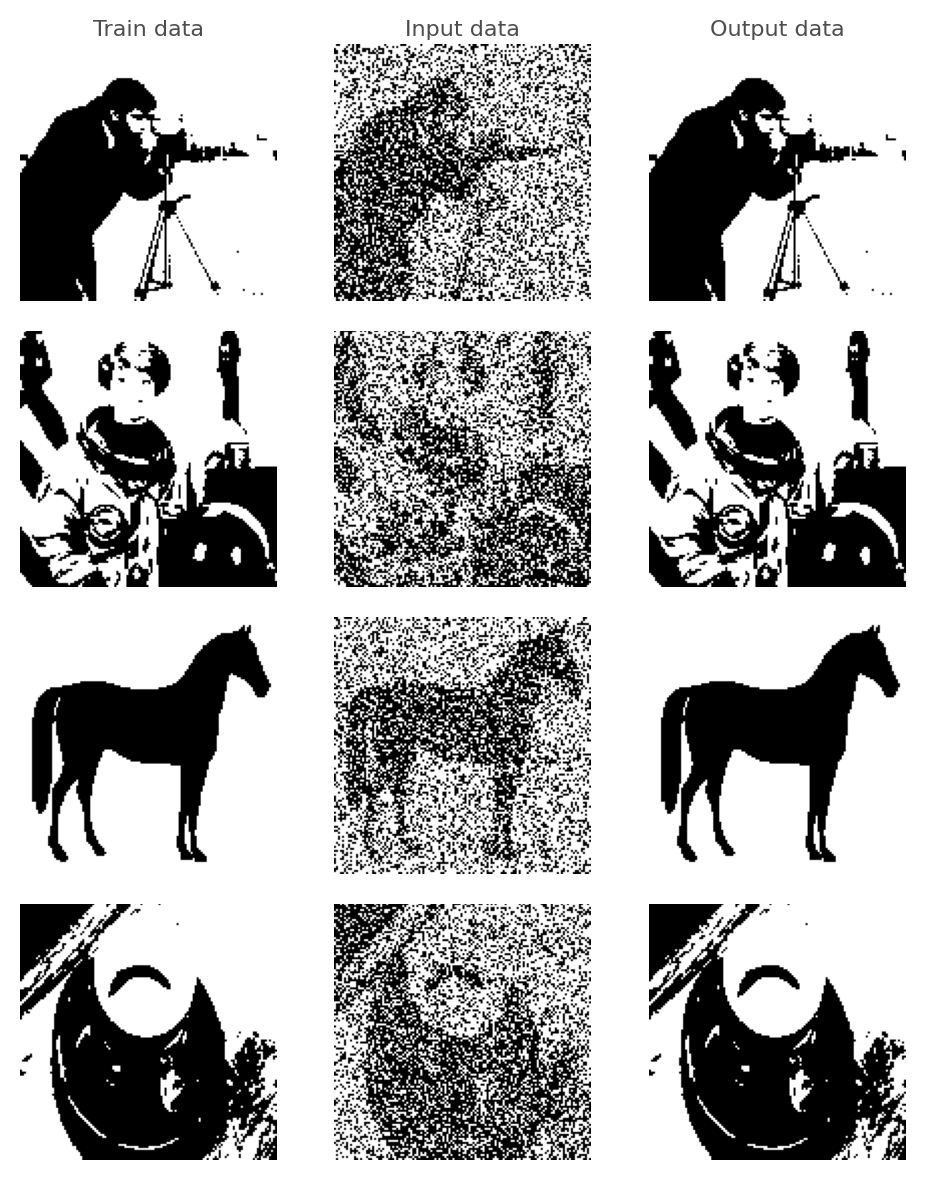
以 HebbianTrainer 为例,可参考 examples/brain_inspired/hopfield_train.py:
[28]:
import numpy as np
import skimage.data
from matplotlib import pyplot as plt
from skimage.color import rgb2gray
from skimage.filters import threshold_mean
from skimage.transform import resize
from canns.models.brain_inspired import AmariHopfieldNetwork
from canns.trainer import HebbianTrainer
np.random.seed(42)
def preprocess_image(img, w=128, h=128) -> np.ndarray:
"""Resize, grayscale (if needed), threshold to binary, then map to {-1,+1}."""
if img.ndim == 3:
img = rgb2gray(img)
img = resize(img, (w, h), anti_aliasing=True)
img = img.astype(np.float32, copy=False)
thresh = threshold_mean(img)
binary = img > thresh
shift = np.where(binary, 1.0, -1.0).astype(np.float32)
return shift.reshape(w * h)
# 从skimage加载训练数据
camera = preprocess_image(skimage.data.camera())
astronaut = preprocess_image(skimage.data.astronaut())
horse = preprocess_image(skimage.data.horse().astype(np.float32))
coffee = preprocess_image(skimage.data.coffee())
data_list = [camera, astronaut, horse, coffee]
# 创建 Amari Hopfield 网络实例并初始化状态
model = AmariHopfieldNetwork(num_neurons=data_list[0].shape[0], asyn=False, activation="sign")
model.init_state()
# 创建HebbianTrainer并训练
trainer = HebbianTrainer(model)
trainer.train(data_list)
# 生成测试数据(添加噪声)
def get_corrupted_input(input, corruption_level):
corrupted = np.copy(input)
inv = np.random.binomial(n=1, p=corruption_level, size=len(input))
for i, v in enumerate(input):
if inv[i]:
corrupted[i] = -1 * v
return corrupted
tests = [get_corrupted_input(d, 0.3) for d in data_list]
# 预测损坏的图像
predicted = trainer.predict_batch(tests, show_sample_progress=True)
# 展示预测结果
def plot(data, test, predicted, figsize=(5, 6)):
def reshape(data):
dim = int(np.sqrt(len(data)))
data = np.reshape(data, (dim, dim))
return data
data = [reshape(d) for d in data]
test = [reshape(d) for d in test]
predicted = [reshape(d) for d in predicted]
fig, axarr = plt.subplots(len(data), 3, figsize=figsize)
for i in range(len(data)):
if i==0:
axarr[i, 0].set_title('Train data')
axarr[i, 1].set_title("Input data")
axarr[i, 2].set_title('Output data')
axarr[i, 0].imshow(data[i], cmap='gray')
axarr[i, 0].axis('off')
axarr[i, 1].imshow(test[i], cmap='gray')
axarr[i, 1].axis('off')
axarr[i, 2].imshow(predicted[i], cmap='gray')
axarr[i, 2].axis('off')
plt.tight_layout()
plt.savefig("discrete_hopfield_train.png")
plt.show()
plot(data_list, tests, predicted, figsize=(5, 6))
Processing samples: 100%|█████████████| 4/4 [00:04<00:00, 1.05s/it, sample=4/4]
拓展开发指南¶
用户可以通过继承canns.trainer.Trainer类来创建自定义的训练器。需要实现以下主要方法:
若要实现新的训练器,需继承 canns.trainer.Trainer 并:
在构造函数中保存目标模型及进度显示配置;
实现
train(self, train_data),定义参数更新策略;实现
predict(self, pattern, *args, **kwargs),给出单样本推理逻辑,必要时使用predict_batch封装批量推理;遵循默认的
configure_progress约定,让用户可以打开/关闭进度条或编译模式;当训练器需要与特定模型协作时,约定好公共属性名(如权重、状态向量)以保证互操作性。
Pipeline¶
总览¶
流水线模块通过将模型、任务、分析和训练模块组合在一起,形成一套端到端的流程,使得对于某些需求可以最简化调用,用户友好。
用法¶
端到端流程可以使用 ThetaSweepPipeline(见 examples/pipeline/theta_sweep_from_external_data.py):
[4]:
from canns.pipeline import ThetaSweepPipeline
pipeline = ThetaSweepPipeline(
trajectory_data=positions,
times=times,
env_size=env_size,
)
results = pipeline.run(output_dir="theta_sweep_results")
🚀 Starting Theta Sweep Pipeline...
📊 Setting up spatial navigation task...
Successfully imported trajectory data with 800 time steps
Spatial dimensions: 2D
Time range: 0.000 to 1.598 s
Mean speed: 1.395 units/s
🧠 Setting up neural networks...
⚡ Running theta sweep simulation...
/Users/sichaohe/Documents/GitHub/canns/.venv/lib/python3.12/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Running for 800 iterations: 100%|██████████| 800/800 [00:10<00:00, 75.01it/s]
📈 Generating trajectory analysis...
Trajectory analysis saved to: theta_sweep_results/trajectory_analysis.png
📊 Generating population activity plot...
Plot saved to: theta_sweep_results/population_activity.png
🎬 Creating theta sweep animation...
[theta_sweep] Using imageio backend for theta sweep animation (auto-detected).
[theta_sweep] Detected JAX; using 'spawn' start method to avoid fork-related deadlocks.
<theta_sweep> Rendering frames: 100%|██████████| 80/80 [03:42<00:00, 2.78s/it]
✅ Pipeline completed successfully!
📁 Results saved to: /Users/sichaohe/Documents/GitHub/canns/docs/zh/notebooks/theta_sweep_results
results 返回包含动画、轨迹分析以及原始仿真数据的字典,可继续交给自定义分析使用。
拓展开发指南¶
用户可以通过继承canns.pipeline.Pipeline类来创建自定义的流水线。需要实现以下主要方法:
自定义流水线时:
继承
canns.pipeline.Pipeline并实现run(...),返回包含主要产物的字典;根据需要调用
prepare_output_dir()管理输出目录,并用set_results()缓存结果,便于后续get_results();在
run()内组合模型、任务、分析器的调用顺序,保持输入输出格式清晰;若有多次复用场景,可在执行前调用
reset()清理上一次运行的缓存状态。